
This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License
The corresponding files can be obtained from:
- Jupyter Notebook:
linear_shell.ipynb - Python script:
linear_shell.py
\(\newcommand{\sym}{\operatorname{sym}} \newcommand{\skew}{\operatorname{skew}} \renewcommand{\tr}{\operatorname{tr}} \newcommand{\T}{^\text{T}} \newcommand{\utilde}[1]{\tilde{#1}} \newcommand{\uttilde}[1]{\tilde{\tilde{#1}}} \newcommand{\tgrad}{\utilde{\nabla}} \newcommand{\bX}{\boldsymbol{X}} \newcommand{\bsig}{\boldsymbol{\sigma}} \newcommand{\btheta}{\boldsymbol{\theta}} \newcommand{\bvarepsilon}{\boldsymbol{\varepsilon}} \newcommand{\bepsilon}{\boldsymbol{\epsilon}} \newcommand{\bgamma}{\boldsymbol{\gamma}} \newcommand{\bchi}{\boldsymbol{\kappa}} \newcommand{\bX}{\boldsymbol{X}} \newcommand{\bxi}{\boldsymbol{\xi}} \newcommand{\ba}{\boldsymbol{a}} \newcommand{\be}{\boldsymbol{e}} \newcommand{\bt}{\boldsymbol{t}} \newcommand{\bu}{\boldsymbol{u}} \newcommand{\bv}{\boldsymbol{v}} \newcommand{\bx}{\boldsymbol{x}} \newcommand{\bF}{\boldsymbol{F}} \newcommand{\bI}{\boldsymbol{I}} \newcommand{\bM}{\boldsymbol{M}} \newcommand{\bN}{\boldsymbol{N}} \newcommand{\bQ}{\boldsymbol{Q}} \newcommand{\bR}{\boldsymbol{R}} \newcommand{\bV}{\boldsymbol{V}} \newcommand{\be}{\boldsymbol{e}}\)
Linear shell model¶
This tour is dedicated to the implementation of small-strain elastic shell model. In the fenics-shells project, the shell surface is described by a mapping between a parametric 2D domain and the shell initial stress-free configuration. This approach makes it impossible to tackle non-manifold surfaces or closed surfaces for which the mapping would exhibit singularities.
In the present implementation, we will instead work directly with the shell surface (either manifold or non-manifold) described as an assembly of planar facets. In this respect, the approach will bear important similarities with the Elastic 3D beam structures. In particular, we will take advantage of UFL ability to compute gradients over a manifold.
Regarding the interpolation spaces, we will use a P2/CR mixed space for displacements and rotations, i.e. the same choice as in the Locking-free Reissner-Mindlin plate with Crouzeix-Raviart interpolation tour. The present shell model will therefore be a small-displacement version of the nonlinear shell model developed in [CAM03].
The implementation of the fully nonlinear shell model of [CAM03] is developed in a separate project for research purposes. You can directly contact the author for more details on this matter.
For the mesh generation, we refer to the Generating a shell model for a shallow arch I-beam with the Gmsh Python API tour.
Shell kinematics and 3D linearized strain¶
The shell initial reference configuration consists of piecewise flat portions and \(\bxi\) in \(\mathbb{R}^3\) will denote an initial point on this surface. \((\be_1,\be_2,\be_3)\) will be a reference local frame with \(\be_3\) the normal to the shell surface, this frame being orthonormal and piecewise constant. A material point \(\bX\) in the shell reference configuration will then be given by:
where \(h\) is the shell thickness
The shell kinematics will be described by its mid-surface displacement \(\bu\) and the infinitesimal rotation vector \(\btheta\) of its director. The new normal director is \(\ba_3 = \bR(\btheta)\be_3 = \be_3+\btheta\times\be_3\) with \(\bR\) the infinitesimal rotation matrix associated with \(\btheta\). Neglecting any thickness change in the shell kinematics, the material point \(\bx\) in the deformed configuration associated with \(\bX\) will then be given by:
Differentiating with respect to \(\bX\), we get:
where we retained only up to first order terms in \(\bu,\btheta\). The 3D deformation gradient is then given by:
where we introduced the in-plane gradient (i.e. the gradient with respect to the shell local tangent plane \((\be_1,\be_2)\)) as follows \(\tgrad\bv = \partial_1\bv \otimes \be_1+ \partial_2\bv \otimes \be_2\). More generally, we will use the following notation \(\utilde{\bv} = v_1\be_1+v_2\be_2\) to denote the in-plane part of \(\bv\).
The linearized strain tensor is then given by:
where \(\sym\) denotes the symmetrized part of a tensor and where we added an incompatible out-of-plane strain \(\epsilon(\zeta)\) which will enable to enforce a plane-stress constraint. The 3D strain can be split into its in-plane components \(\utilde{\utilde{\bvarepsilon}}\), out-of-plane shear components \(\bgamma = 2\utilde{\bvarepsilon}_3\) and out-of-plane transverse components \(\varepsilon_{33}\):
where \(\bepsilon=\sym(\tgrad\utilde{\bu})\) is the membrane strain and \(\bchi = \sym(\be_3\times \tgrad\btheta)\) the bending curvature. We see that we recover the definition of the curvature and shear strain of the Reissner-Mindlin plate model.
Elastic energy density¶
The internal work of deformation density per shell unit surface is then given by:
where \(\bN\) is the shell membrane tensor, \(\bM\) the bending moment tensor and \(\bQ\) the shear force vector appearing in duality with \(\bepsilon,\bchi,\bgamma\) respectively. The out-of-plane stress \(\sigma_{33}\) appears in duality with the out-of-plane strain \(\epsilon(\zeta)\). The latter is in fact a purely local variable which can be locally eliminated to enforce the plane stress condition \(\sigma_{33}=0\).
Indeed, the shell free energy density can be defined as:
for isotropic linear elasticity.
When minimizing this energy over the shell degrees of freedom, the minimization over \(\epsilon\) is in fact local and we can replace the above free-energy by its plane-stress counterpart:
where \(\psi_\text{ps}\) is the elastic strain energy density for a 2D plane-stress material:
with the plane-stress pseudo Lamé coefficient (see the 2D linear elasticity tour):
Taking the derivative of the strain energy with respect to the 3D strain components gives the local 3D stress-strain constitutive relation:
where \(\mathbb{C}_\text{ps}\) is the plane-stress elasticity tensor.
Stress-resultant constitutive equations¶
Plugging relations (1) into the previous 3D constitutive relation yields the following stress-resultant equations, assuming a homogeneous shell across the thickness:
FEniCS implementation¶
Import statements and physical parameters¶
We first load the relevant packages and some UFL functions. We then define the corressponding physical parameters. In particular, we consider here a uniformly distributed loading of unit intensity along the downward global \(Z\) direction and of intensity 0.2 along the \(Y\) direction perpendicular to the arch plane in order to induce a combined bending and twisting deflection mode.
[10]:
from dolfin import *
from ufl import Jacobian, replace
import numpy as np
import meshio
# material parameters
thick = Constant(1e-3)
E = Constant(210e9)
nu = Constant(0.3)
lmbda = E * nu / (1 + nu) / (1 - 2 * nu)
mu = E / 2 / (1 + nu)
lmbda_ps = 2 * lmbda * mu / (lmbda + 2 * mu)
# loading (self-weight)
f = Constant((0, 0.2, -1))
Loading the mesh and computing a local tangent frame¶
We now load the mesh as well as the facet MeshFunction from the XDMF files generated from a Gmsh script using Gmsh’s Python API (see this notebook).
We then define the local_frame function which returns the UFL representation of the local frame \((\be_1,\be_2,\be_3)\). We first use UFL’s Jacobian function to retrieve the Jacobian of the mapping from reference cells to spatial coordinates. Contrary to the fenics-shells approach which uses a global analytical mapping between the reference domain and the shell surface, we use here the reference element mapping of the finite-element method. For a shell, the Jacobian is of size
\(3\times 2\) with both columns \(\bt_1,\bt_2\) being a vector of the local tangent plane. We therefore compute \(\be_3\), the normal to the mid-surface from \(\bt_1\times \bt_2\). We then have to choose a convention to compute \(\be_1,\be_2\), knowing \(\be_3\). Our convention is that \(\be_1\) lies in the plane orthogonal to \(\be_Y\) and \(\be_3\). If \(\be_3\) happens to be colinear to \(\be_Y\), we set \(\be_1=\be_Z\). \(\be_2\) then
follows from \(\be_2=\be_3\times\be_1\).
[11]:
filename = "I_beam.xdmf"
mesh = Mesh()
with XDMFFile(filename) as mesh_file:
mesh_file.read(mesh)
mvc = MeshValueCollection("size_t", mesh, 1)
with XDMFFile(filename.replace(".", "_facet_region.")) as infile:
infile.read(mvc, "name_to_read")
facets = MeshFunction("size_t", mesh, mvc)
def local_frame(mesh):
t = Jacobian(mesh)
if mesh.geometric_dimension() == 2:
t1 = as_vector([t[0, 0], t[1, 0], 0])
t2 = as_vector([t[0, 1], t[1, 1], 0])
else:
t1 = as_vector([t[0, 0], t[1, 0], t[2, 0]])
t2 = as_vector([t[0, 1], t[1, 1], t[2, 1]])
e3 = cross(t1, t2)
e3 /= sqrt(dot(e3, e3))
ey = as_vector([0, 1, 0])
ez = as_vector([0, 0, 1])
e1 = cross(ey, e3)
norm_e1 = sqrt(dot(e1, e1))
e1 = conditional(lt(norm_e1, 0.5), ez, e1 / norm_e1)
e2 = cross(e3, e1)
e2 /= sqrt(dot(e2, e2))
return e1, e2, e3
frame = local_frame(mesh)
e1, e2, e3 = frame
VT = VectorFunctionSpace(mesh, "DG", 0, dim=3)
ffile = XDMFFile("output.xdmf")
ffile.parameters["functions_share_mesh"] = True
for (i, ei) in enumerate(frame):
ei = Function(VT, name="e{}".format(i + 1))
ei.assign(project(frame[i], VT))
ffile.write(ei, 0)
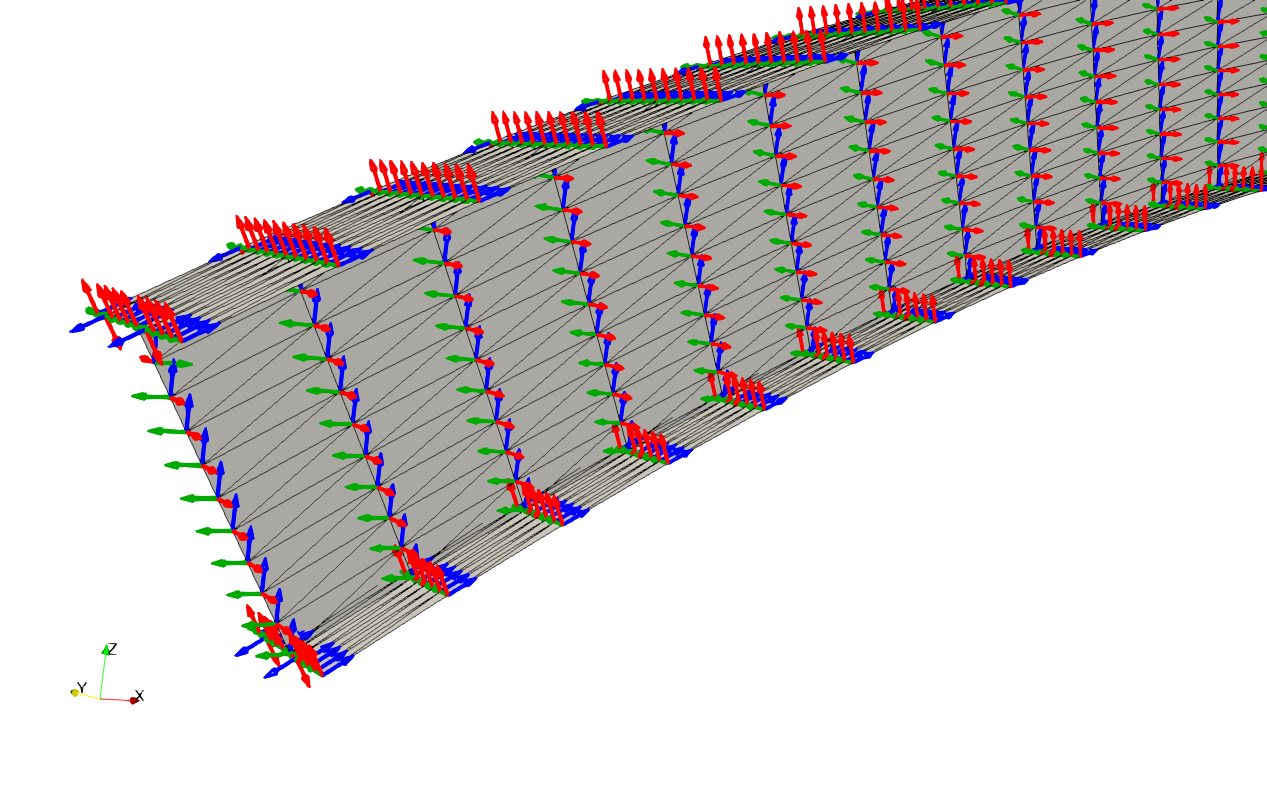
The local frame is then stored in an output XDMFFile. Note that when it is represented via DG0 Functions but Paraview does not seem to handle very well such fields on a surface shell. The fields seem to be displayed as CG1 Functions, inducing erratic orientations near the boundary. Overall, the orientation is however consistent with what has been defined (\(\be_1\) in blue, \(\be_2\) in green, \(\be_3\) in red).
FunctionSpace choice and strain measures¶
We now use the afore-mentioned P2/CRinterpolation for the displacement \(\bu\) and the rotation \(\btheta\) variables using a MixedElement.
[12]:
Ue = VectorElement("Lagrange", mesh.ufl_cell(), 2, dim=3)
Te = VectorElement("CR", mesh.ufl_cell(), 1, dim=3)
V = FunctionSpace(mesh, MixedElement([Ue, Te]))
v = Function(V)
u, theta = split(v)
v_ = TestFunction(V)
u_, theta_ = split(v_)
dv = TrialFunction(V)
We then define the in-plane projector and the in-plane (tangential) gradient operator (\(\tilde\nabla\) above) as follows:
[13]:
def vstack(vectors):
"""Stack a list of vectors vertically."""
return as_matrix([[v[i] for i in range(len(v))] for v in vectors])
def hstack(vectors):
"""Stack a list of vectors horizontally."""
return vstack(vectors).T
# In-plane projection
P_plane = hstack([e1, e2])
def t_grad(u):
"""Tangential gradient operator"""
g = grad(u)
return dot(g, P_plane)
We then extract gradient of the in-plane displacement \(\tilde\nabla\tilde\bu\) and define the membrane strain \(\bepsilon\) as its symmetric part. We similarly define the bending curvature \(\bchi\) and shear strain \(\bgamma\).
[14]:
t_gu = dot(P_plane.T, t_grad(u))
eps = sym(t_gu)
kappa = sym(dot(P_plane.T, t_grad(cross(e3, theta))))
gamma = t_grad(dot(u, e3)) - dot(P_plane.T, cross(e3, theta))
eps_ = replace(eps, {v: v_})
kappa_ = replace(kappa, {v: v_})
gamma_ = replace(gamma, {v: v_})
Stress measures¶
We then define the corresponding stress measure using linear elastic constitutive laws.
[15]:
def plane_stress_elasticity(e):
return lmbda_ps * tr(e) * Identity(2) + 2 * mu * e
N = thick * plane_stress_elasticity(eps)
M = thick ** 3 / 12 * plane_stress_elasticity(kappa)
Q = mu * thick * gamma
Drilling rotation stabilization¶
A classical problem in shell models involving 6 degrees of freedom (3D rotation) is the absence of any constraint on the drilling rotation \(\theta_3=\btheta\cdot\be_3\). However, this degree of freedom is necessary to tackle non-smooth junctions between planar shell facets which have a different normal vector. In our implementation, we propose to add an additional quadratic energy penalizing the drilling strain, as commonly done for elastic shells. The drilling strain is obtained from the skew symmetric in-plane component of the transformation gradient and the drilling rotation:
We consider an additional drilling contribution to the work of deformation given by:
where the drilling stiffness \(Eh^3\) is the usually recommended value in the literature.
[16]:
drilling_strain = (t_gu[0, 1] - t_gu[1, 0]) / 2 - dot(theta, e3)
drilling_strain_ = replace(drilling_strain, {v: v_})
drilling_stress = E * thick ** 3 * drilling_strain
Boundary conditions and resolution¶
We then apply fixed boundary conditions on both ends and finally form the corresponding bilinear form and linear right-hand side form before solving the corresponding system.
[17]:
bc = [
DirichletBC(V.sub(0), Constant((0.0,) * 3), facets, 1),
DirichletBC(V.sub(0), Constant((0.0,) * 3), facets, 2),
]
Wdef = (
inner(N, eps_)
+ inner(M, kappa_)
+ dot(Q, gamma_)
+ drilling_stress * drilling_strain_
) * dx
a = derivative(Wdef, v, dv)
Wext = dot(f, u_) * dx
solve(a == Wext, v, bc)
We then output the displacement and rotation fields to a XDMF file.
[18]:
u = v.sub(0, True)
u.rename("Displacement", "u")
theta = v.sub(1, True)
theta.rename("Rotation", "theta")
ffile.write(u, 0)
ffile.write(theta, 0)
ffile.close()
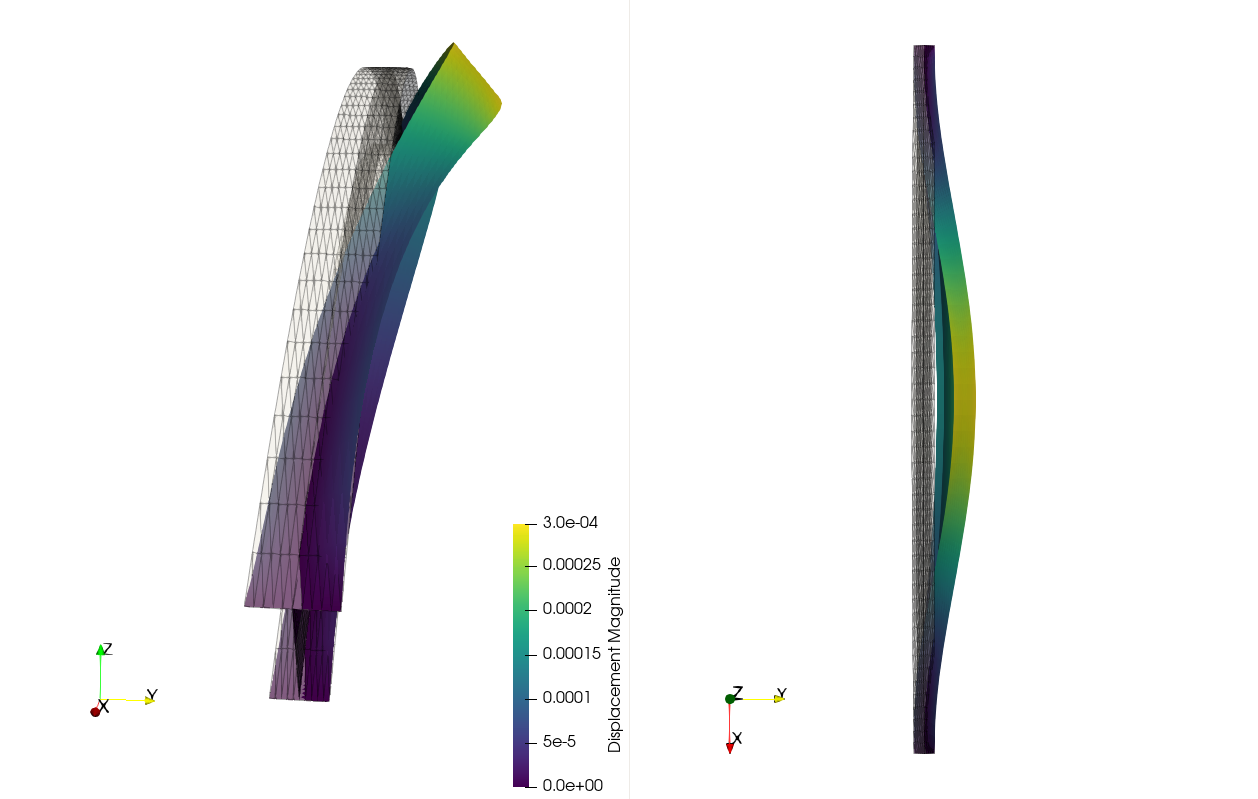
which yields the following deformed configuration (2000 times amplification):
References¶
[CAM03] Campello, E. M. B., Pimenta, P. M., & Wriggers, P. (2003). A triangular finite shell element based on a fully nonlinear shell formulation. Computational Mechanics, 31(6), 505-518.
[ ]: